










 Harry James
Harry James 0
0  2660
2660 408
408
Fjernstyrede biler er sjove, sikker, men selv-kørsel robotbiler er endnu sjovere. I denne selvstudie bygger vi en firehjulet robot, der kan køre rundt og undgå forhindringer. Jeg købte dette komplette 4WD kit fra AliExpress, men du kunne nemt købe de fleste af disse komponenter fra en elektronikbutik og sammensætte det selv.
Jeg anbefaler, at du læser alle instruktionerne, inden du starter, da det gør nogle ting tydelige, som måske er forvirrende første gang igennem. Dette kan også se ud som et meget langt, avanceret projekt på grund af længden af instruktionerne, men det er faktisk temmelig enkelt. Ingen grund til at blive skræmt - dette er et projekt på begynderniveau, som du kan få nogle tilfredsstillende resultater med og derefter bygge videre på, når du lærer mere. Kan du ikke lide denne robotstil? Her er nogle flere Arduino-robotter 8 Arduino-robotter, du kan bygge til mindre end $ 125, 8 Arduino-robotter, du kan bygge til mindre end $ 125. Arduino kan gøre meget, men vidste du, at det kan skabe fulde robotter? For ganske billig, også! du kunne nemt bygge i stedet.
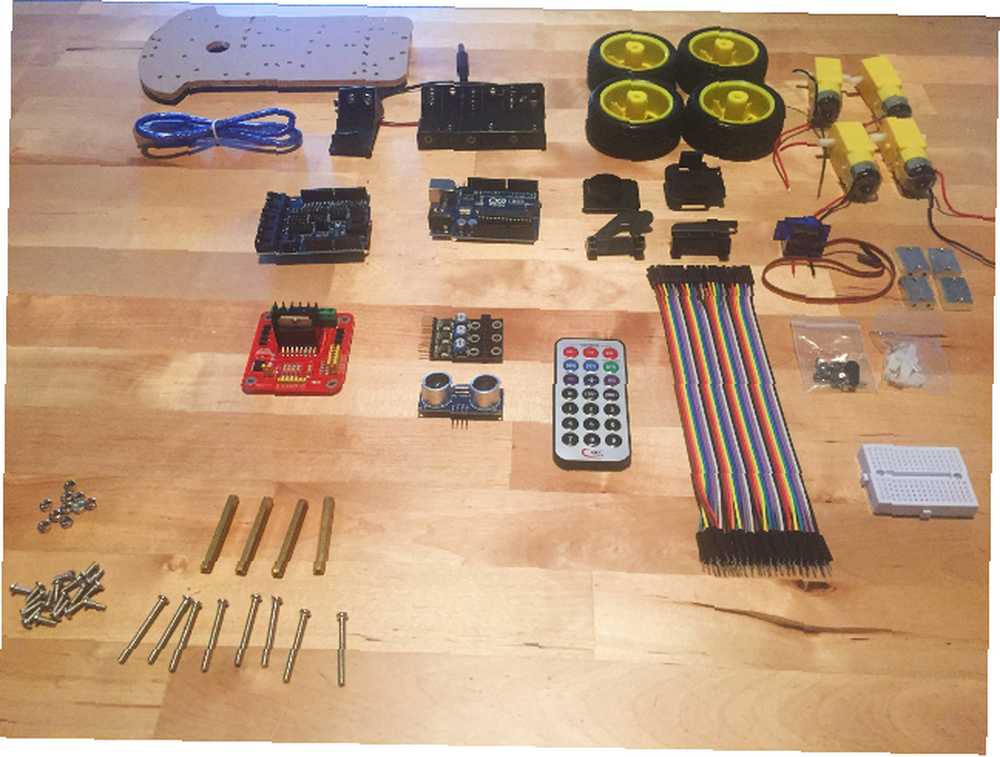
Her er hvad vi har, når vi har taget alt ud af emballagen:
For at komme i gang fastgør vi motorerne og H-broen (kortet, der leverer strøm til motorerne) til den nederste del af chassiset. Først monteres de fire metalbeslag (de er rektangulære, borede blokke af metal) til hver motor ved hjælp af to lange bolte og to møtrikker.
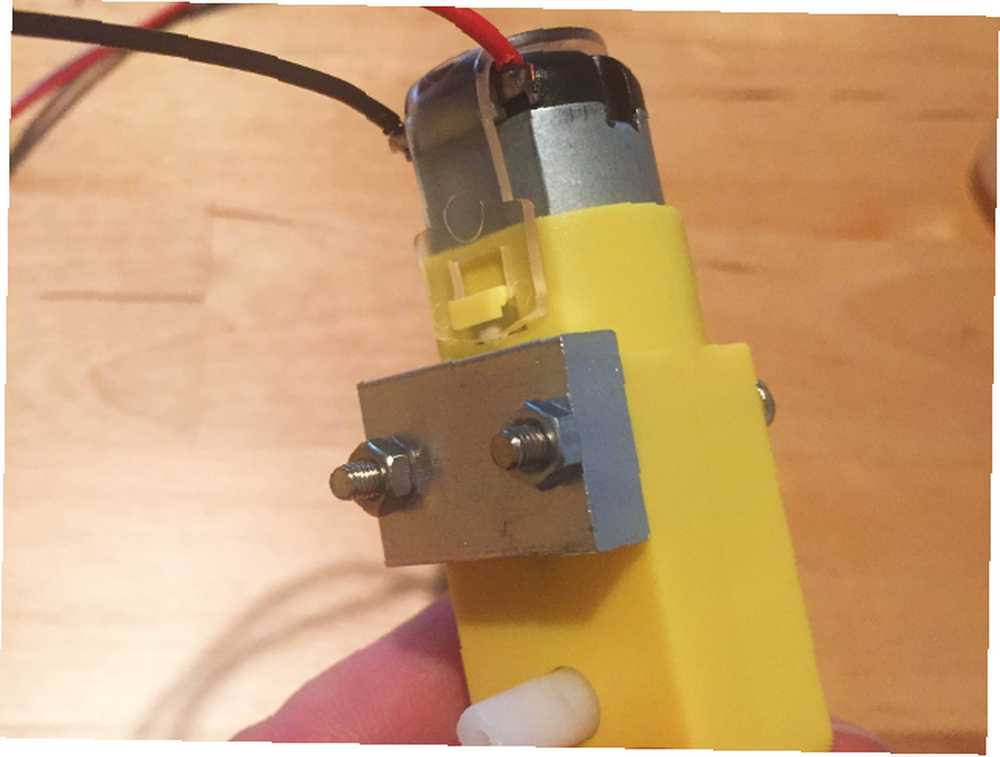
Du skal sørge for, at de er fastgjort korrekt, så tjek billedet herunder for at sikre dig, at siden af blokken med to borede huller vender nedad. Bemærk, at ledningerne på hver motor peger mod chassisets centrum.
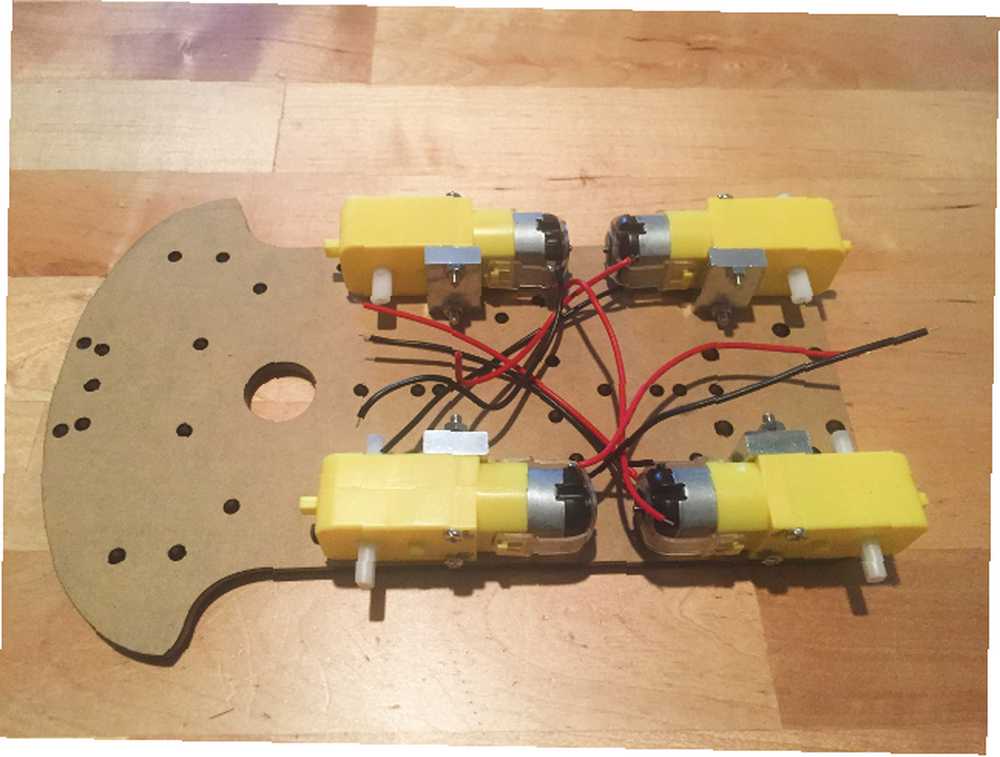
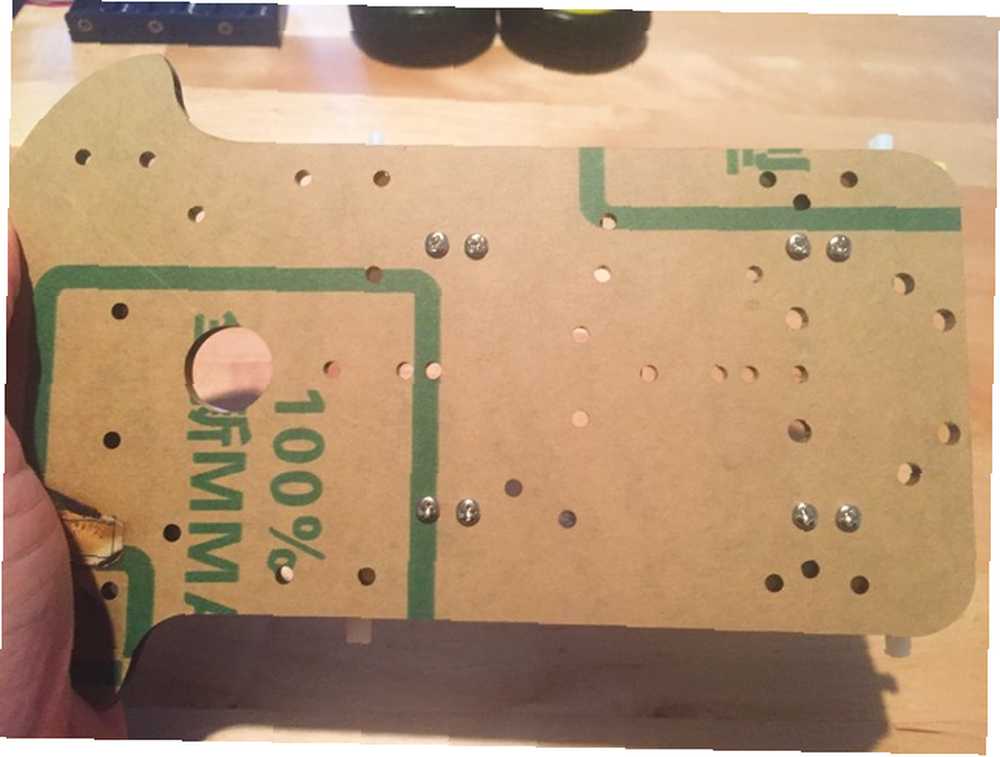
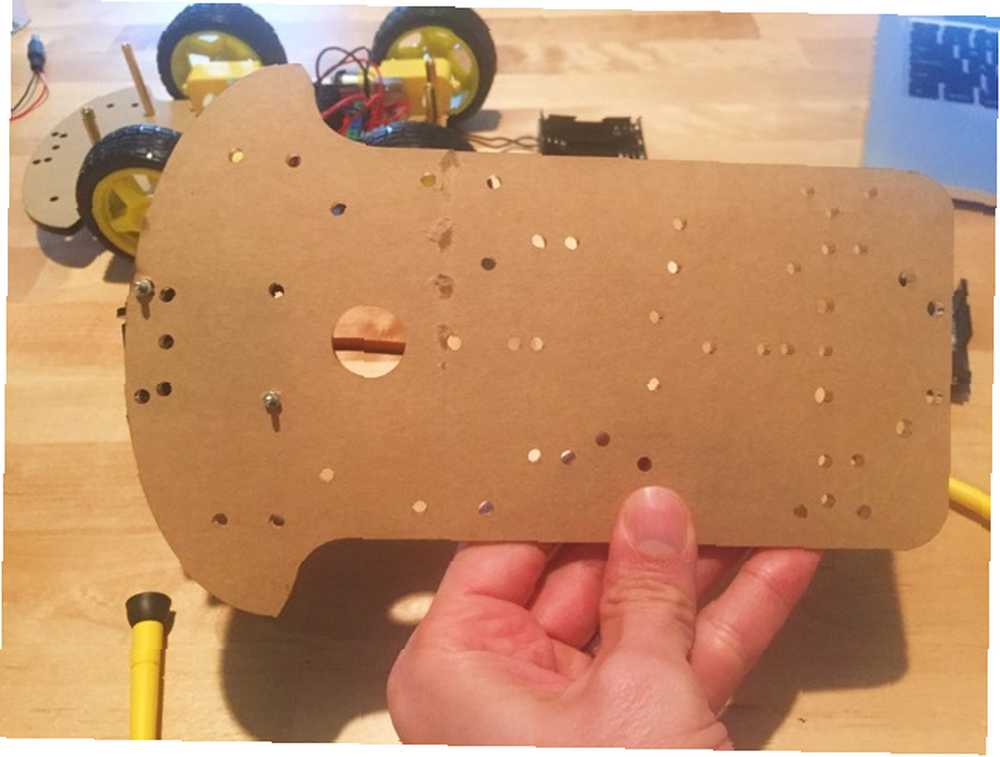
Nu kan hver motor fastgøres til kabinettet ved hjælp af to korte bolte i bunden af hvert metalbeslag. Her er en oversigt over bunden af chassiset, så du kan se, hvor boltene skal være:
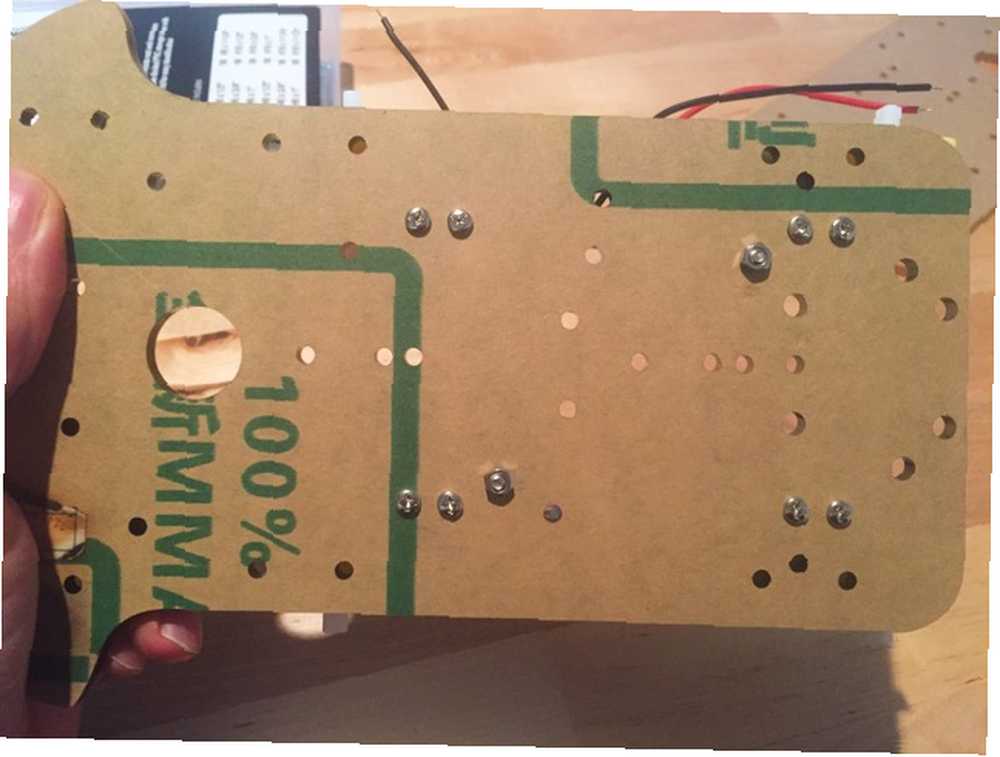
Det næste trin er at fastgøre H-broen (det er det røde bræt, i mit sæt) til chassiset. Det kan være en god ide at vente, indtil alle ledninger er knyttet til H-broen, før du gør dette, men det er op til dig (jeg syntes, det var lettere). En hurtig note: Mit sæt manglede et antal fastgørelseselementer, så jeg brugte elektrisk bånd til at sikre broen. Du kan imidlertid her se, hvor boltene og møtrikkerne ville være gået:
Nu hvor H-broen er monteret, kan du begynde at tilslutte strømforsyningen. Da seks-AA-batteriholderen leveres med en jævnstrømsadapter, skal du enten afskære enden (som jeg gjorde) eller køre jumperledninger til selve batterierne.

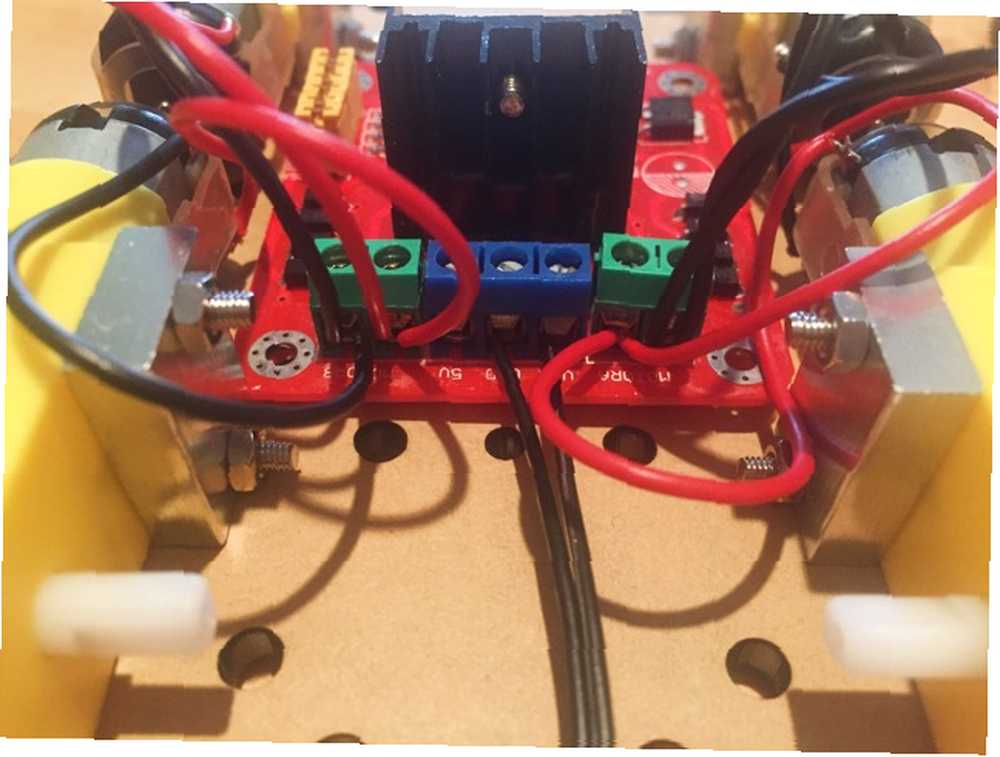
Ligegyldigt hvordan du beslutter at gøre det, kører du den positive ledning til den mærkede port “VMS” og den negative ledning til den der er mærket “GND” på broen. Skru fastgørelsesorganerne ned, og sørg for, at de er sikre. Derefter forbinder du motorledningerne. På begge sider er der et sæt af to havne; den ene er mærket “motora” og den anden “MOTORB.” Begge røde ledninger på hver side går ind i den yderste grønne port, og begge sorte ledninger går ind i den yderste. Dette billede skal gøre det mere tydeligt:
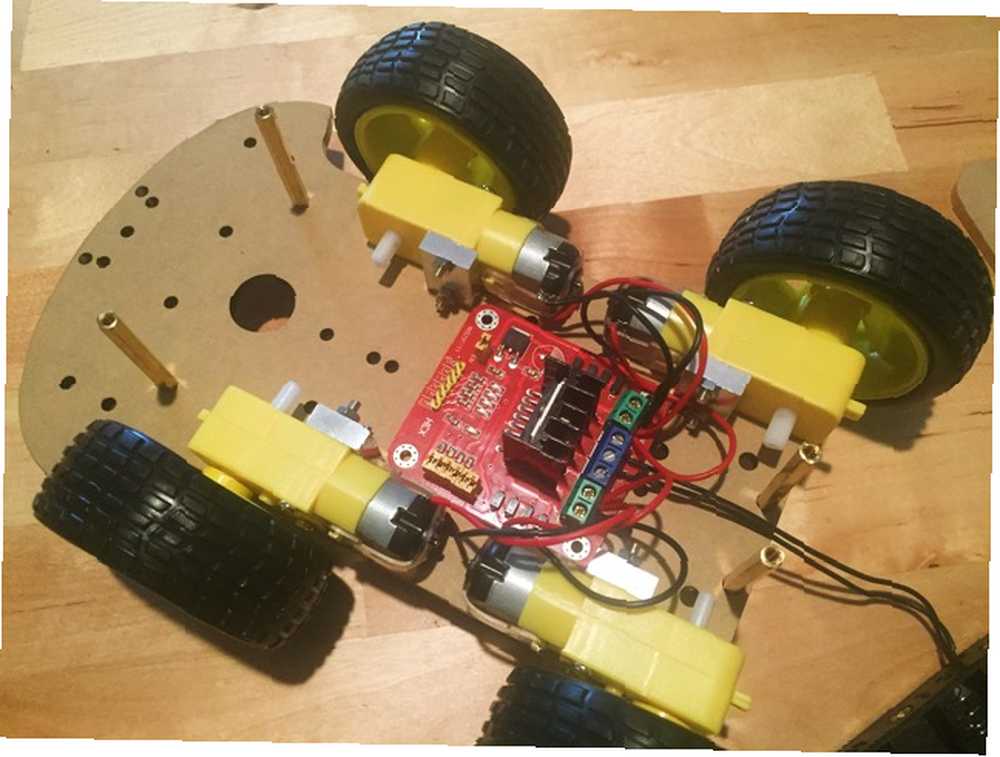
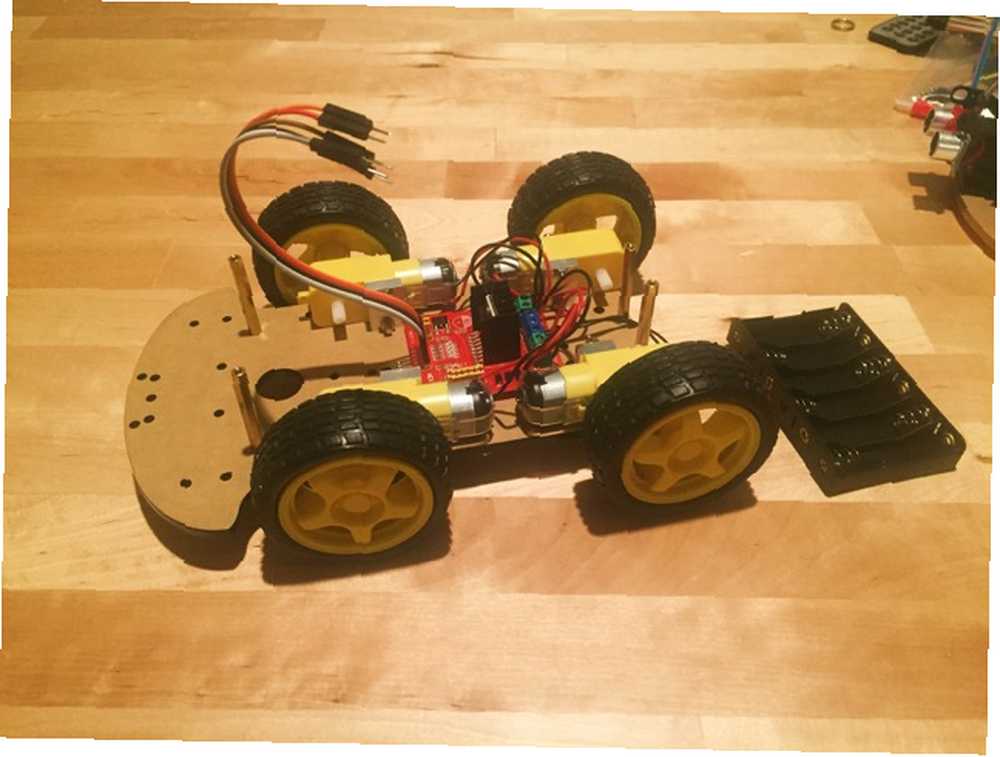
Jeg fandt, at jeg var nødt til at fjerne noget af huset fra motortrådene for at få dette til at fungere. Nu hvor du har alle motorerne og strømforsyningen tilsluttet, skal du skubbe hjulene på motorens drivaksler, og fastgør de fire kobberaksler på de steder, der er vist på billedet herunder (hver kobberaksel har brug for en lille bolt). Denne robot begynder at tage form!
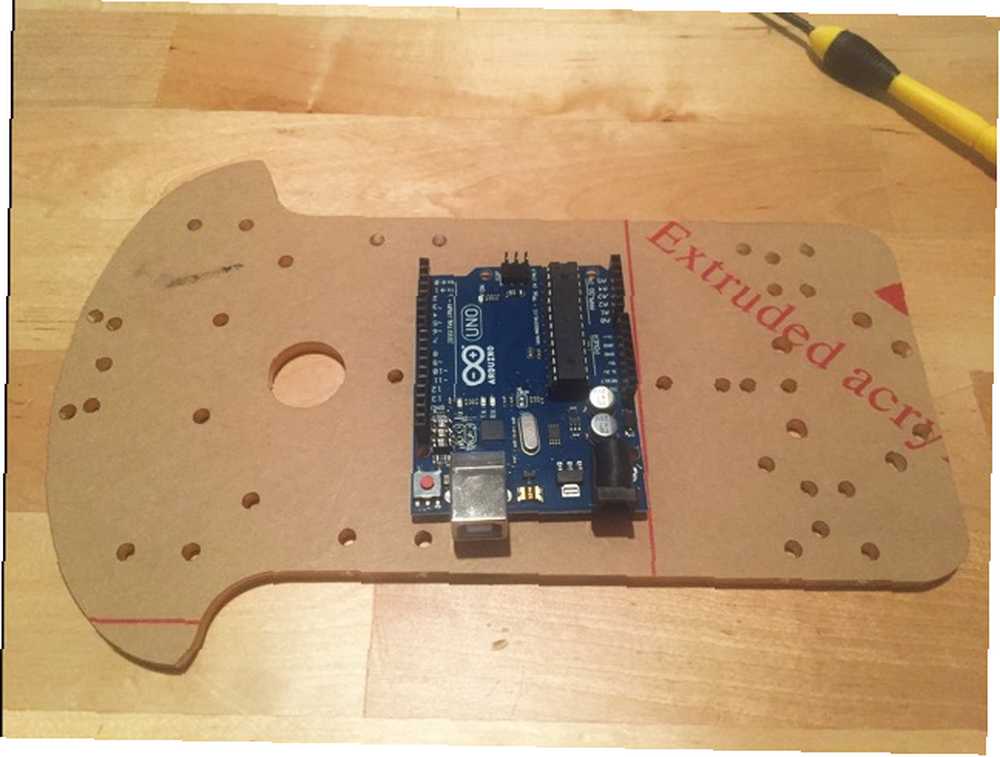
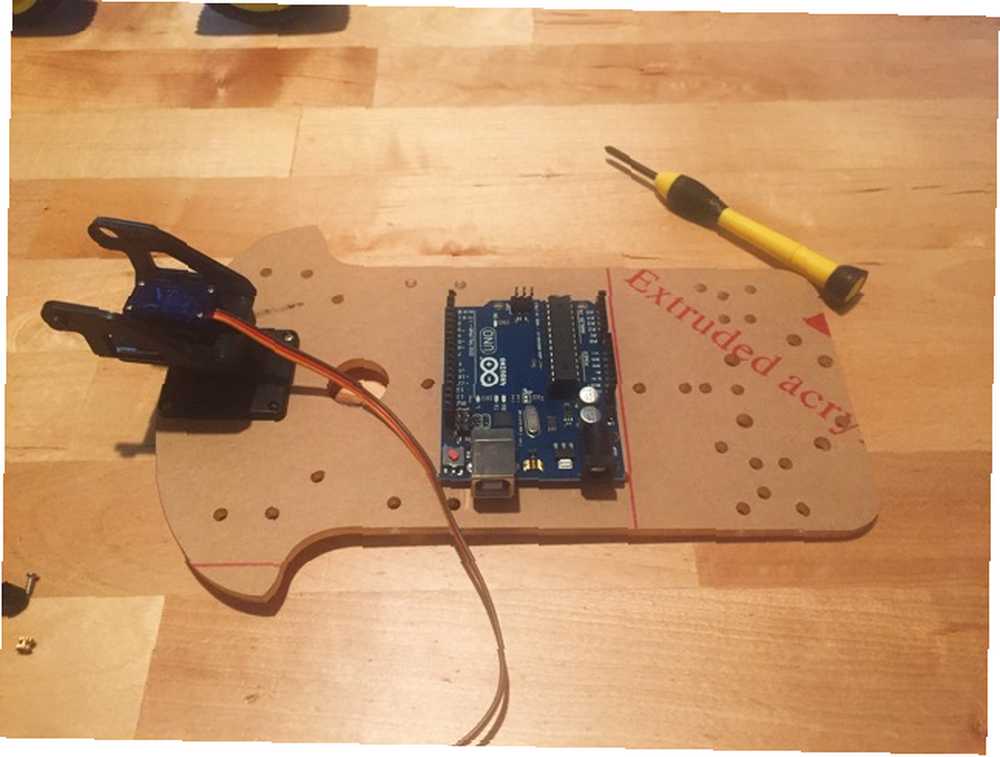
Sæt nu den del af chassiset til side, og tag den anden, der sidder på toppen. Det næste trin er at fastgøre Arduino-igen, jeg var nødt til at bruge elektrisk tape, men du skulle være i stand til bedre at sikre din med nogle bolte og møtrikker.
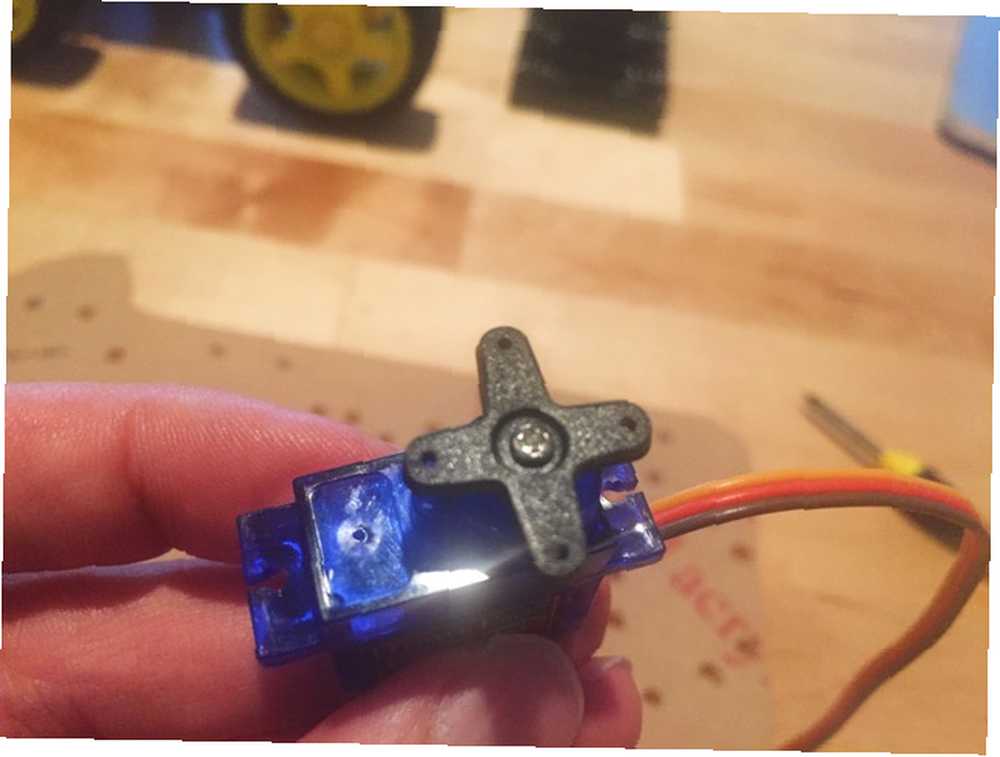
Det næste trin kræver mikroservo, det sorte tværstykke, servoholderen (som består af tre sorte plaststykker) og nogle små skruer. Brug en af de større skarpe skruer i sættet til at fastgøre det sorte tværstykke til mikroservo:
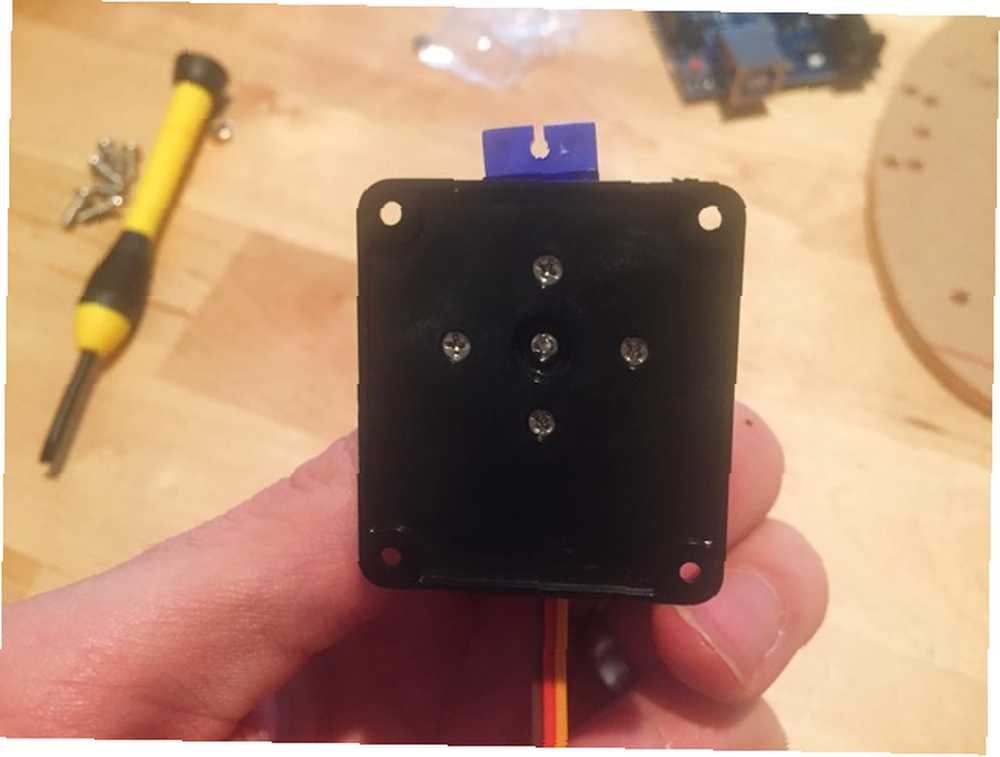
Drej derefter servoen på hovedet ned i holderens sorte plastring. Sørg for, at ledningerne, der kommer ud af servoen, vender i samme retning som holderens længere del (igen, se billedet nedenfor), og brug fire små skruer til at fastgøre tværstangen (der er fire huller i holderen, der justeres med hullerne på tværstangen).

Sådan ser det ud, når det er vedhæftet:
Til sidst skal du tage de to andre stykker af servoholderen og sæt dem fast på servoen (der er riller i sidestykkerne, der matcher plastiktappen på servoen).
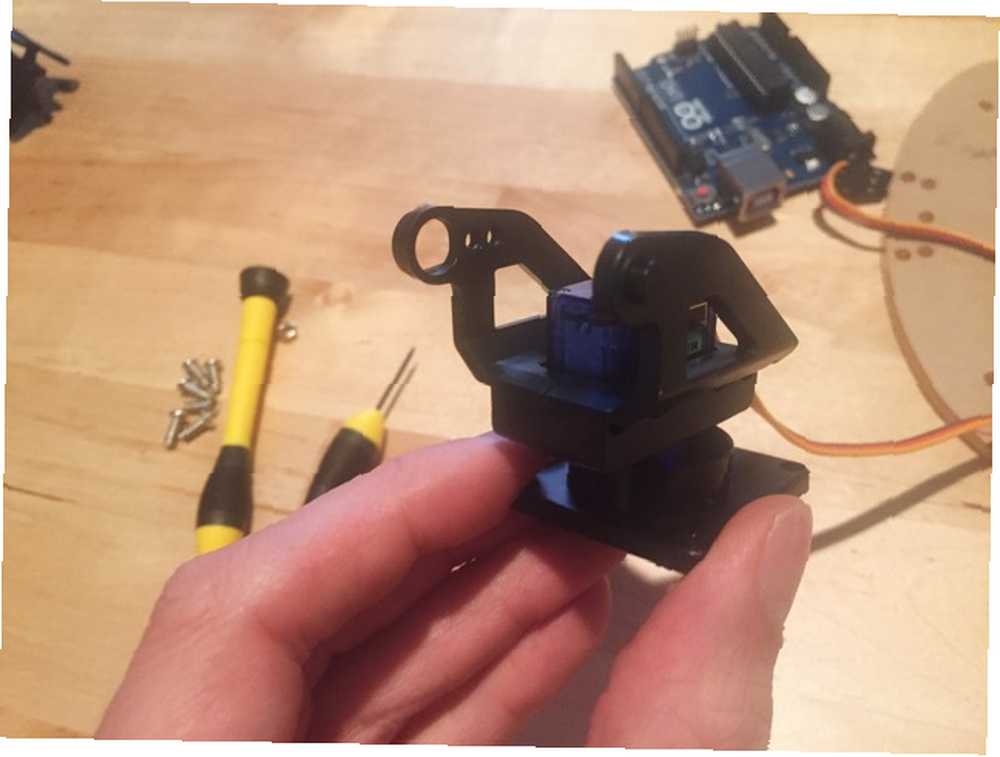
Nu hvor servoholderen er færdig, kan den monteres på chassiset.
Her er hvor boltene går:
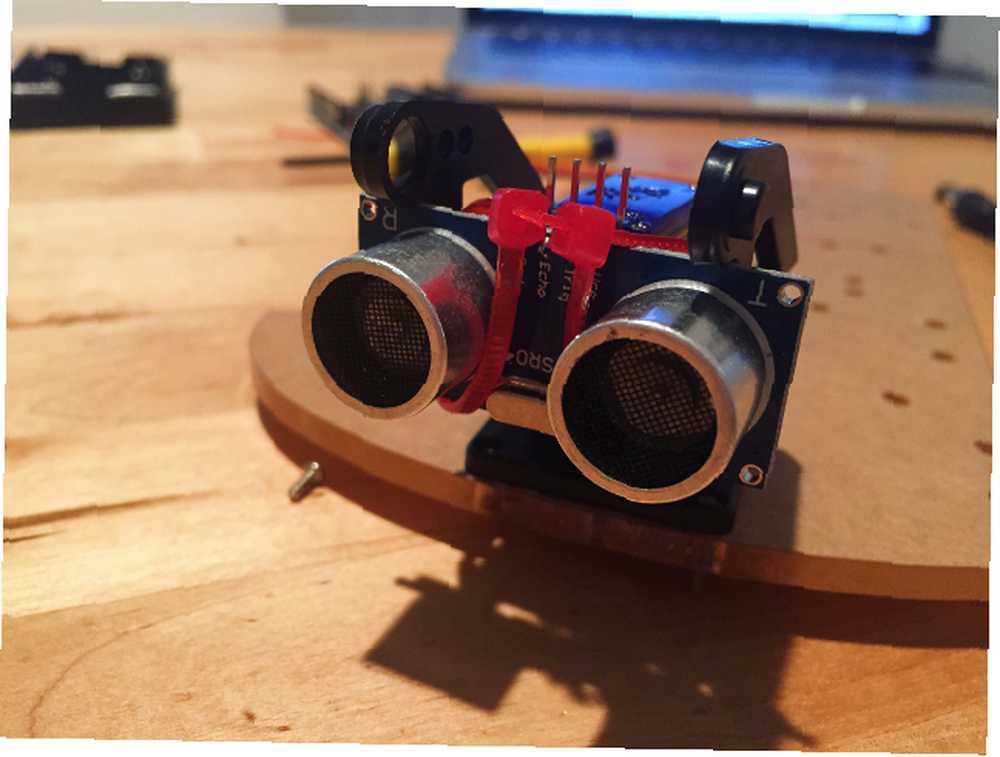
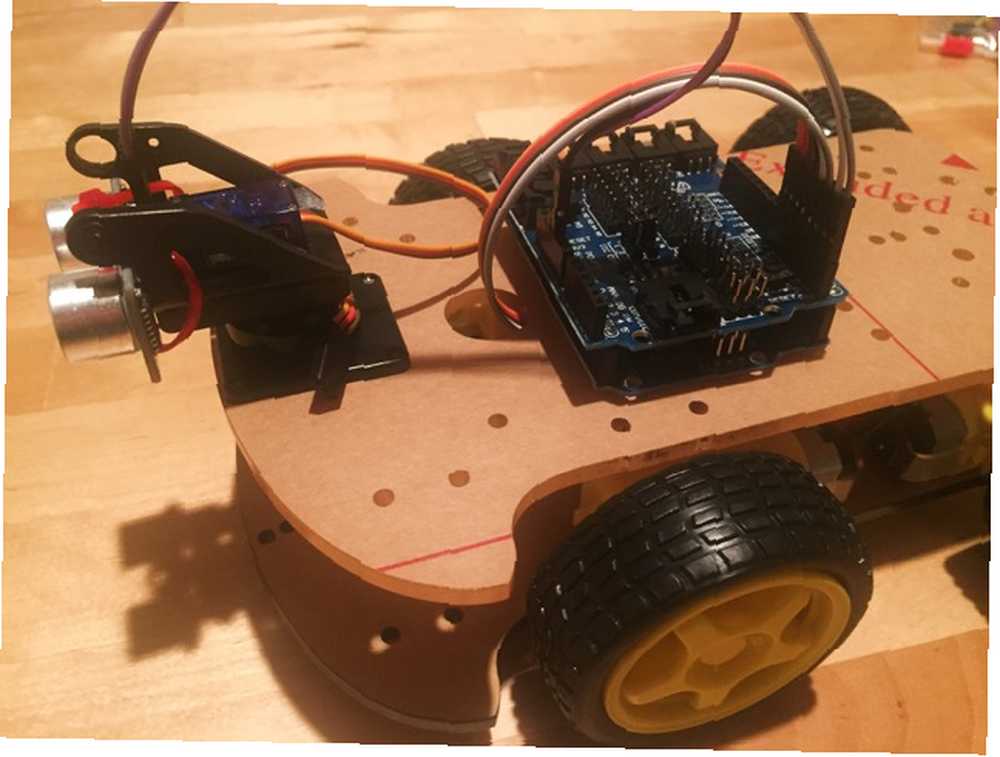
Det er tid til at give vores robot nogle øjne. Sæt ultralydssensoren fast på servoholderen ved hjælp af to lynlåsbånd.
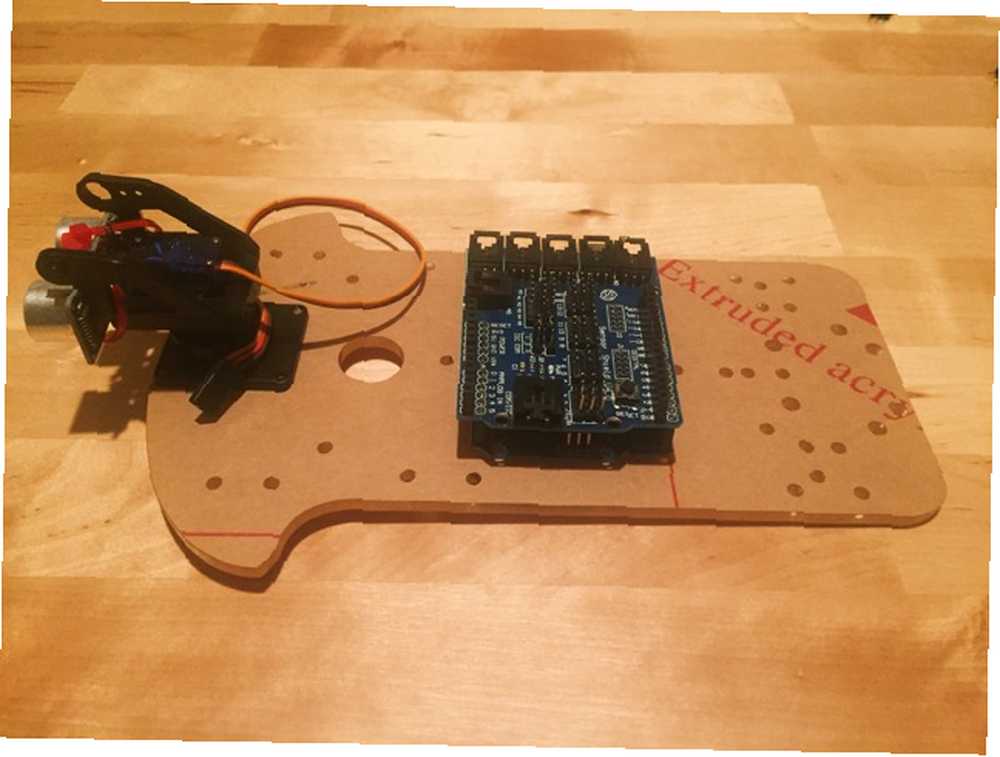
Hvis du arbejder fra det samme sæt, som jeg, har du modtaget et Arduino-sensorskærm. Vi vil ikke bruge det i denne build, men du kan poppe den oven på UNO nu, hvis du vil (som jeg har på billedet herunder). Justér tappene på bunden af skjoldet med I / O-portene på Arduino og tryk ned for at forbinde dem. Du har ikke brug for det i øjeblikket, men skjoldene kan komme godt med De Top 4 Arduino-skærme til at supermagt dine projekter De top 4 Arduino-skærme til supermagt Dine projekter Du har købt et Arduino-startkit, du har fulgt alle de grundlæggende guider, men nu er du ramt af en snublestein - du har brug for flere bits og bobs for at realisere din elektronikdrøm. Heldigvis, hvis du har ... .
Uanset om du tilslutter et sensorskærm eller ej, har du nu brug for fire ledninger til at forbinde ultralydssensoren til Arduino. Der er fire stifter på sensoren, VCC, GND, TRIG og ECHO. Forbind VCC til 5V-stiften på Arduino, GND til GND og TRIG og ECHO til I / O-stifter 12 og 13.
Tag nu fat i den nederste del af chassiset, og tilslut seks jumperledninger til I / O-stifterne på H-broen (de er markeret ENA, IN1, IN2, IN3, IN4 og ENB). Vær opmærksom på hvilke farveledninger, der er forbundet til hvilke porte, som du bliver nødt til at vide senere.
Nu er det tid til at begynde at sammensætte denne ting. Grib den øverste del af chassiset, og sæt det på toppen af kobberakslerne, der er forbundet til den nedre del, og træk ledningerne, der er fastgjort til H-broen, gennem hullet i midten af chassiset. Tilslut de seks ledninger til I / O-porte som følger:
- ENA til I / O-port 11
- ENB til I / O-port 10
- A1 til I / O-port 5
- A2 til I / O-port 6
- B1 til I / O-port 4
- B2 til I / O-port 3
Brug nu fire korte skruer til at fastgøre den øverste del af chassiset til kobberakslerne. Sæt batteriholderen med seks AA på toppen af chassiset (skru den ned, hvis du kan), fastgør 9V-celleholderen til Arduino, og denne bot er klar til at gynge!
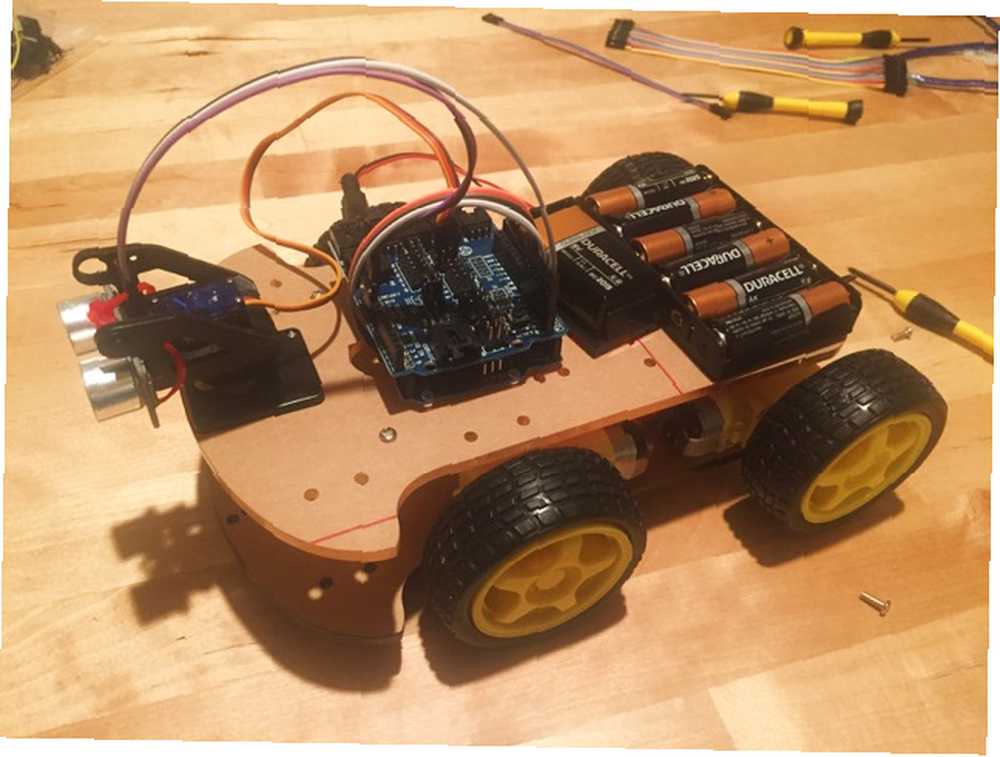
Nå, næsten klar til at rocke. Det har ikke helt nok personlighed endnu.
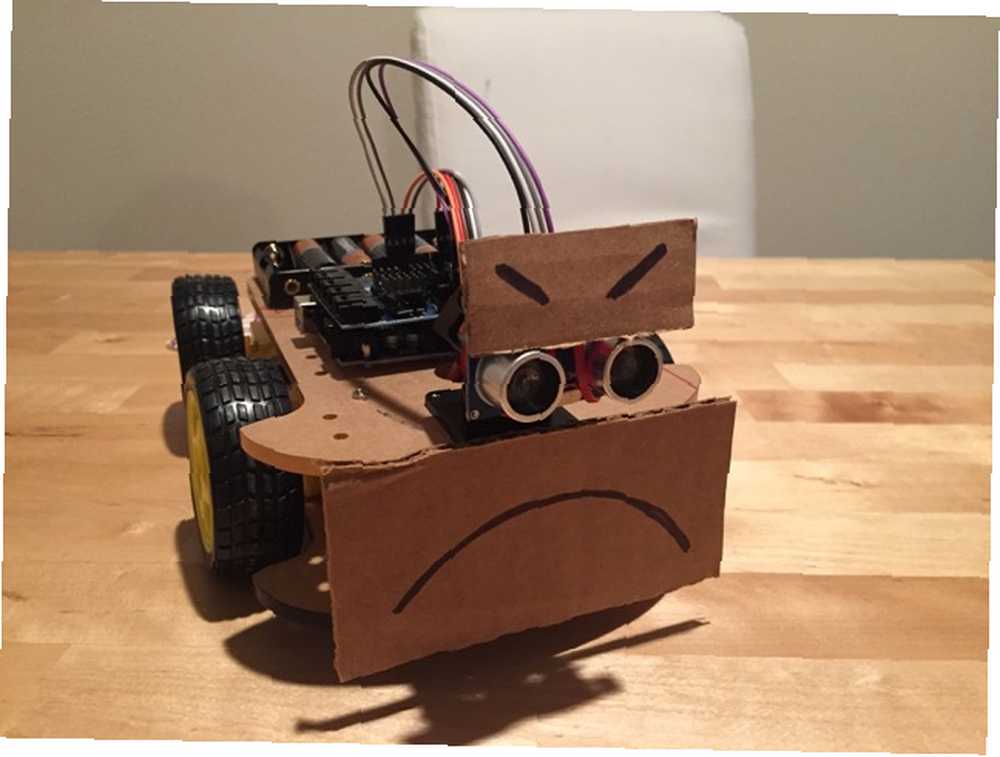
Sådan der. Nu for at give det en hjerne. Lad os lave noget programmering.
Den første ting, vi skal gøre, er at teste for at sikre, at broen og motorerne er korrekt tilsluttet. Her er en hurtig skitse, der fortæller bot at køre frem i et halvt sekund, køre bagud i et halvt sekund og derefter dreje til venstre og højre:
Det er en masse kode til en simpel test, men at definere alle disse funktioner gør det lettere at finpusse senere. (Stor tak til Billwaa for hans blogindlæg om at bruge H-broen til at definere disse funktioner.) Hvis der gik noget galt, skal du kontrollere alle dine forbindelser, og at ledningerne er forbundet til de rigtige stifter. Hvis alt fungerede, er det tid til at gå over på sensortesten. For at bruge ultralydssensoren skal du downloade NewPing-biblioteket og derefter bruge Sketch> Inkluder bibliotek> Tilføj .ZIP-bibliotek ... at indlæse biblioteket.
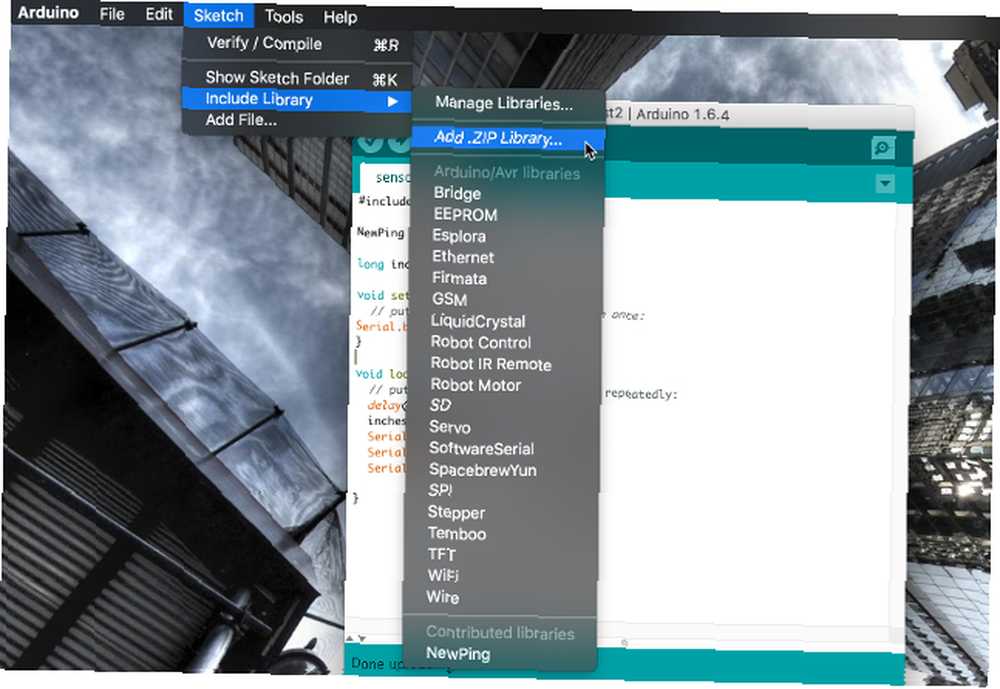
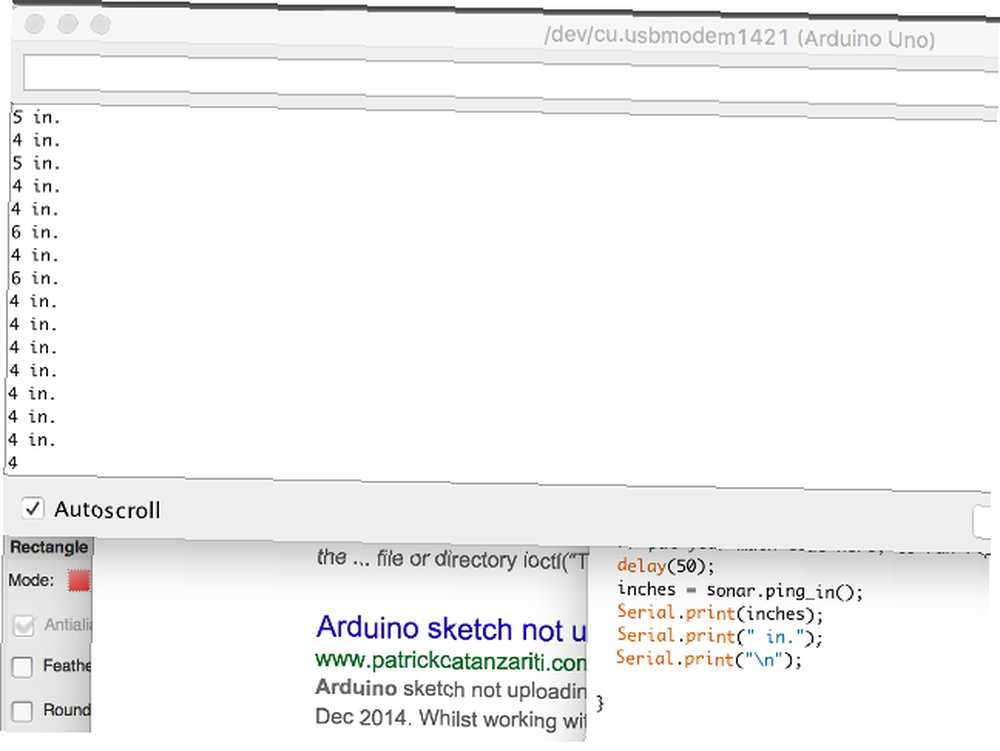
Sørg for, at du ser sætningen inkluderet øverst på din skitse. hvis du ikke gør det, skal du ramme Skitse> Inkluder bibliotek> NewPing. Når du har gjort det, skal du indlæse følgende skitse:
Upload skitsen, og åbn den serielle skærm vha Værktøjer> Seriel skærm. Du skal se en hurtigt opdaterende rækkefølge af numre. Hold din hånd foran sensoren og se, om dette nummer ændres. Flyt din hånd ind og ud, og du skal få en måling af, hvor langt din hånd er fra sensoren.
Hvis alt fungerede korrekt, er det tid til at sammensætte det hele og lade denne ting køre! Her er koden til roboten nu. Som du sandsynligvis kan fortælle, er dette dybest set de to testskitser, der er sat sammen med en tilføjet, hvis erklæring, for at kontrollere robotens opførsel. Vi har givet det en meget simpel adfærd mod forhindring af forhindring: hvis den registrerer noget mindre end fire centimeter væk, vil den tage backup, dreje til venstre og begynde at bevæge sig igen. Her er en video af bot i aktion.
Giv din robot noget liv
Når du har fået denne opførsel til at fungere korrekt, kan du tilføje mere kompleks opførsel; få robotten til at skifte mellem at dreje til venstre og højre, eller vælg tilfældigt; lyd en summer, hvis den kommer tæt på noget; bare drej i stedet for at tage sikkerhedskopi; du er virkelig kun begrænset af din fantasi. Du kan bruge næsten hvad som helst i dit Arduino-startkit Hvad er der i dit Arduino Starter Kit? [Arduino-begyndere] Hvad er der i dit Arduino-startkit? [Arduino-begyndere] Det er let at blive overvældet overfor en kasse fuld af elektroniske komponenter. Her er en guide til nøjagtigt, hvad du finder i dit sæt. for at tilføje mere funktionalitet. Du vil også bemærke, at vi ikke har kodet noget for servoen endnu: du kan faktisk lave din robot “øjne” bevæges frem og tilbage. måske bruge dem til at søge en sti i stedet for bare at tage sikkerhedskopi, når den finder en hindring direkte foran.
Fortæl os, hvis du beslutter at bygge denne robot eller en anden, og fortæl os, hvordan du beslutter at tilpasse dens opførsel eller udseende. Hvis du har spørgsmål til denne robot, skal du sende dem i kommentarerne nedenfor, så ser jeg, om jeg kan hjælpe!