











 Peter Holmes
Peter Holmes 0
0  4780
4780 135
135
Samtidig lokalisering og kortlægning (SLAM) er sandsynligvis ikke en sætning, du bruger hver dag. Flere af de nyeste seje teknologiske vidundere bruger imidlertid denne proces hvert millisekund af deres levetid.
Hvad er SLAM? Hvorfor har vi brug for det? Og hvad er disse seje teknologier, du taler om?
Fra akronym til abstrakt idé
Her er et hurtigt spil til dig. Hvilken af disse hører ikke til?
- Selvkørende biler
- Augmented reality apps
- Autonome luft- og undervandsbiler
- Mixed reality wearables
- Roomba
Du tror måske, at svaret let er det sidste punkt på listen. På en måde har du ret. På en anden måde var dette et trick-spil, da alle disse ting er relateret.
 Billedkredit: Nathan Kroll / Flickr
Billedkredit: Nathan Kroll / Flickr
Det egentlige spørgsmål om det (meget seje) spil er dette: Hvad gør alle disse teknologier gennemførlige? Svaret: samtidig lokalisering og kortlægning eller SLAM! som de seje børn siger det.
Generelt er formålet med SLAM-algoritmer let nok til at itereere. En robot vil bruge samtidig lokalisering og kortlægning for at estimere dens placering og orientering (eller posering) i rummet, mens den opretter et kort over sit miljø. Dette gør det muligt for roboten at identificere, hvor den er, og hvordan man bevæger sig gennem et ukendt rum.
Derfor, ja, det vil sige alt, hvad denne smarte og smarte algoritme gør er at estimere position. En anden populær teknologi, Global Positioning System (eller GPS) Hvordan fungerer GPS-sporing, og hvad kan du spore med det? Hvordan fungerer GPS-tracking, og hvad kan du spore med det? GPS. Vi kender det som den teknologi, der leder os fra A til B. Men GPS er mere end det. Der er en verden af muligheder, og vi vil ikke have dig til at gå glip af. har vurderet positionen siden den første Golfkrig i 1990'erne.
Skelnen mellem SLAM og GPS
Så hvorfor er behovet for en ny algoritme? GPS har to iboende problemer. For det første, mens GPS er nøjagtigt i forhold til en global skala, reducerer både præcision og nøjagtighed skalaen i forhold til et rum, et bord eller et lille kryds. GPS har nøjagtighed ned til en meter, men hvad er centimeteren? millimeter?
For det andet fungerer GPS ikke godt under vand. Med ikke godt mener jeg slet ikke. Tilsvarende ydeevne er plettet i bygninger med tykke betonvægge. Eller i kældre. Du får ideen. GPS er et satellitbaseret system, der lider af fysiske begrænsninger.
Så SLAM-algoritmer sigter mod at give en bedre følelse af position for vores mest avancerede gadgets og maskiner.
Disse enheder har allerede en litany af sensorer og perifere enheder. SLAM-algoritmer bruger dataene fra så mange af disse som muligt ved hjælp af noget matematik og statistik.
Kylling eller æg? Position eller kort?
Matematik og statistik er nødvendig for at besvare en kompliceret quandary: er position, der bruges til at oprette kortet over omgivelserne eller er kortet over omgivelserne, der bruges til at beregne position?
Tænkte eksperimentstid! Du er interdimensionelt skævt til et ukendt sted. Hvad er den første ting du gør? Panik? OK, rolig ned, tag en åndedrag. Tag en anden. Hvad er den anden ting, du gør? Se dig omkring og prøv at finde noget kendt. En stol er til venstre for dig. En plante er til din højre side. Et sofabord er foran dig.
Dernæst en gang den lammende frygt for “Hvor fanden er jeg?” slides, du begynder at bevæge dig. Vent, hvordan fungerer bevægelse i denne dimension? Tag et skridt fremad. Stolen og planten bliver mindre, og bordet bliver større. Nu kan du bekræfte, at du faktisk går fremad.
Observationer er nøglen til at forbedre SLAM-estimeringens nøjagtighed. I nedenstående video, når roboten bevæger sig fra markør til markør, bygger den et bedre kort over miljøet.
Tilbage til den anden dimension, jo mere du går rundt, jo mere orienterer du dig. Trin i alle retninger bekræfter, at bevægelse i denne dimension ligner din hjemmedimension. Når du går til højre, væver planten sig større. Hjælpsomt kan du se andre ting, som du identificerer som vartegn i denne nye verden, som giver dig mulighed for at vandre mere trygt.
Dette er i det væsentlige SLAM-processen.
Indgange til processen
For at foretage disse estimater bruger algoritmerne flere stykker data, der kan kategoriseres som interne eller eksterne. For dit interdimensionelle transporteksempel (indrøm det, du havde en sjov tur), de interne målinger er størrelsen på trin og retning.
De udførte målinger er i form af billeder. At identificere vartegn som planter, stol og bord er en let opgave for øjne og hjerne. Den mest kraftfulde processor kendt - den menneskelige hjerne - er i stand til at tage disse billeder og ikke kun identificere objekter, men også estimere afstanden til det objekt.
Desværre (eller heldigvis, afhængigt af din frygt for SkyNet), har robotter ikke en menneskelig hjerne som processor. Maskiner er afhængige af siliciumchips med menneskelig skrevet kode som en hjerne.
Andre maskinstykker foretager eksterne målinger. Perifere enheder som gyroskoper eller anden inertial måleenhed (IMU) er nyttige til at gøre dette. Roboter som selvkørende biler bruger også udtagning af hjulposition som en intern måling.
 Billedkredit: Jennifer Morrow / Flickr
Billedkredit: Jennifer Morrow / Flickr
Eksternt bruger en selvkørende bil og andre robotter LIDAR. Ligesom hvordan radar bruger radiobølger, måler LIDAR reflekterede lysimpulser til at identificere afstand. Det anvendte lys er typisk ultraviolet eller nær infrarødt, svarende til en infrarød dybdesensor.
LIDAR udsender titusinder af impulser pr. Sekund for at skabe et ekstremt højdefinitions tredimensionelt point-skykort. Så ja, næste gang Tesla ruller rundt på autopilot, skyder det dig med en laser. Masser af gange.
Derudover bruger SLAM-algoritmer statiske billeder og computervisionsteknikker som en ekstern måling. Dette gøres med et enkelt kamera, men kan gøres endnu mere nøjagtigt med et stereopar.
Inde i den sorte boks
Interne målinger vil opdatere den estimerede position, som kan bruges til at opdatere det eksterne kort. Eksterne målinger vil opdatere det estimerede kort, som kan bruges til at opdatere positionen. Du kan tænke på det som et inferensproblem, og tanken er at finde den optimale løsning.
En almindelig måde at gøre dette på er gennem sandsynlighed. Teknikker såsom et partikelfilter er omtrentlig position og kortlægning ved hjælp af Bayesian statistisk inferens.
Et partikelfilter bruger et bestemt antal partikler spredt ved en Gaussisk fordeling. Hver partikel “forudsiger” robotens aktuelle position. En sandsynlighed tildeles til hver partikel. Alle partikler starter med den samme sandsynlighed.
Når der foretages målinger, der bekræfter hinanden (f.eks. Trin frem = tabel bliver større), er de partikler der er “korrekt” i deres position tildeles gradvis bedre sandsynligheder. Partikler, der er langt væk, tildeles lavere sandsynligheder.
Jo flere vartegn en robot kan identificere, jo bedre. Landemærker giver feedback til algoritmen og giver mulighed for mere præcise beregninger.
Aktuelle applikationer ved hjælp af SLAM-algoritmer
Lad os bryde det ned, seje stykke teknologi af et cool stykke teknologi.
Autonome undervandsbiler (AUV'er)
Ubemandede ubåde kan operere autonomt ved hjælp af SLAM-teknikker. En intern IMU giver data om acceleration og bevægelse i tre retninger. Derudover bruger AUV'er bundvendt sonar til dybdeskøn. Side scan sonar skaber billeder af havbunden med en rækkevidde på et par hundrede meter.
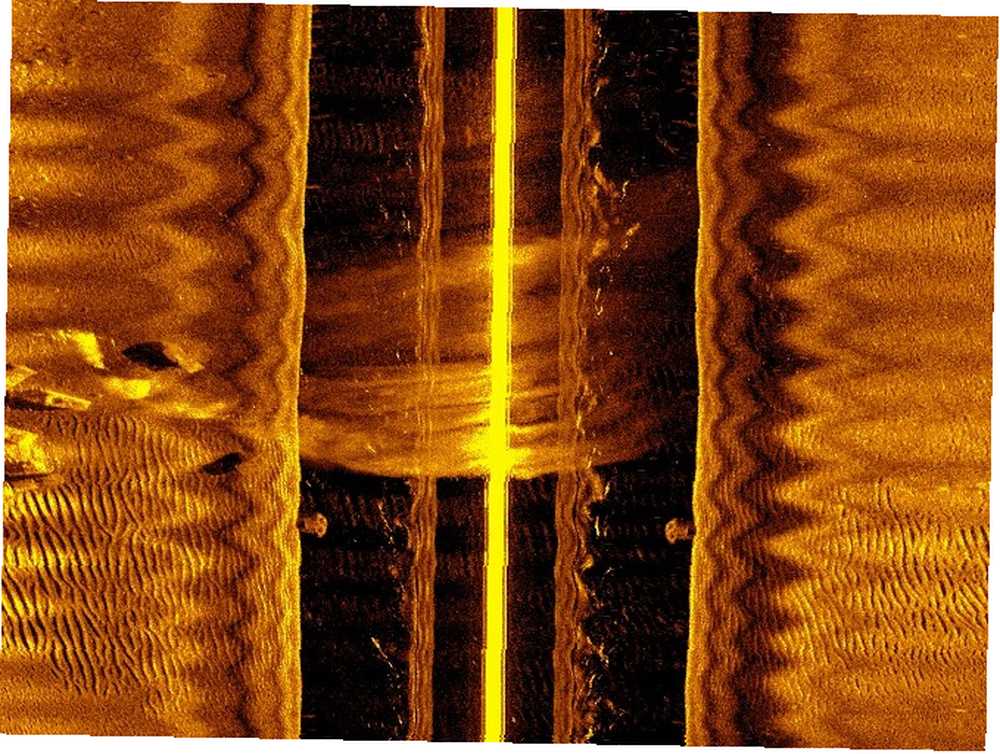 Billedkredit: Florida Sea Grant / Flickr
Billedkredit: Florida Sea Grant / Flickr
Bærbarheder med blandet virkelighed
Microsoft og Magic Leap har produceret bærbare briller, der introducerer Mixed Reality-applikationer Windows Mixed Reality: Hvad det er og hvordan man prøver det nu Windows Mixed Reality: Hvad det er, og hvordan man prøver det nu Windows Mixed Reality er en ny funktion, der lader dig bruge Windows 10 i virtual og augmented reality. Her er hvorfor det er spændende, og hvordan du finder ud af, om din pc understøtter det. . Det er afgørende for disse bærbare at estimere position og oprette et kort. Enhederne bruger kortet til at placere virtuelle objekter ovenpå virkelige objekter og få dem til at interagere med hinanden.
Da disse bærbare er små, kan de ikke bruge store perifere enheder som LIDAR eller ekkolod. I stedet bruges mindre infrarøde dybdesensorer og udadvendte kameraer til at kortlægge et miljø.
Selvkørende biler
Autonome biler har en lille smule en fordel i forhold til wearables. Med en meget større fysisk størrelse kan biler indeholde større computere og have flere perifere enheder til at foretage interne og eksterne målinger. Selvkørende biler repræsenterer på mange måder fremtidens teknologi, både med hensyn til software og hardware.
SLAM-teknologi forbedrer sig
Når SLAM-teknologi bruges på en række forskellige måder, er det kun et spørgsmål om tid, før den er perfektioneret. Når selvkørende biler (og andre køretøjer) ses dagligt, ved du, at samtidig lokalisering og kortlægning er klar til, at alle kan bruge.
Selvkørselsteknologi forbedres for hver dag. Vil du vide mere? Tjek MakeUseOfs detaljerede oversigt over, hvordan selvkørende biler fungerer, hvordan selvkørende biler fungerer: nødderne og boltene bag Googles autonome bilprogram Sådan arbejder selvkørende biler: møtrikkerne og boltene bag Googles autonome bilprogram At kunne pendle tilbage og frem for at arbejde mens du sover, spiser eller indhenter dine yndlingsblogs er et koncept, der er lige så tiltalende og tilsyneladende langt væk og for futuristisk til faktisk at ske. .
Billedkredit: chesky_w / Depositphotos